嘎嘎‘s NoteBook
首页
友情链接
homepage
往期整理
历史归档
文章分类
文章标签
关于我
嘎嘎sama | 一只喜欢瞎鼓捣的笨蛋
0
课程
课程
设计与制造II
字数
893
阅读时长≈
3
分钟
2025-7-2
2026-2-15
你好!我是
嘎嘎sama
广告位招租
了解更多
目录
1. 机械设计总论
运动副分类&表示
机构运动简图及其画法
平面机构自由度计算
高副低代
平面机构的组成原理
2. 平面机构的运动分析
3. 平面机构的力分析
运动副中的反力
力分析的图解法
力分析的杆组法
机械的效率
机械的自锁
4. 平面连杆机构
5. 凸轮机构及其设计
反转法
6. 齿轮机构及其设计
齿廓啮合基本定理
渐开线
根切
变位齿轮
最新发布
机械选修课一览
2026-6-5
STM32
2026-5-13
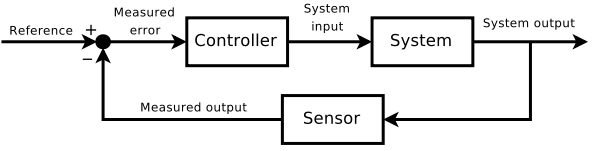
控制工程基础
2026-2-15
液压I
2026-2-15
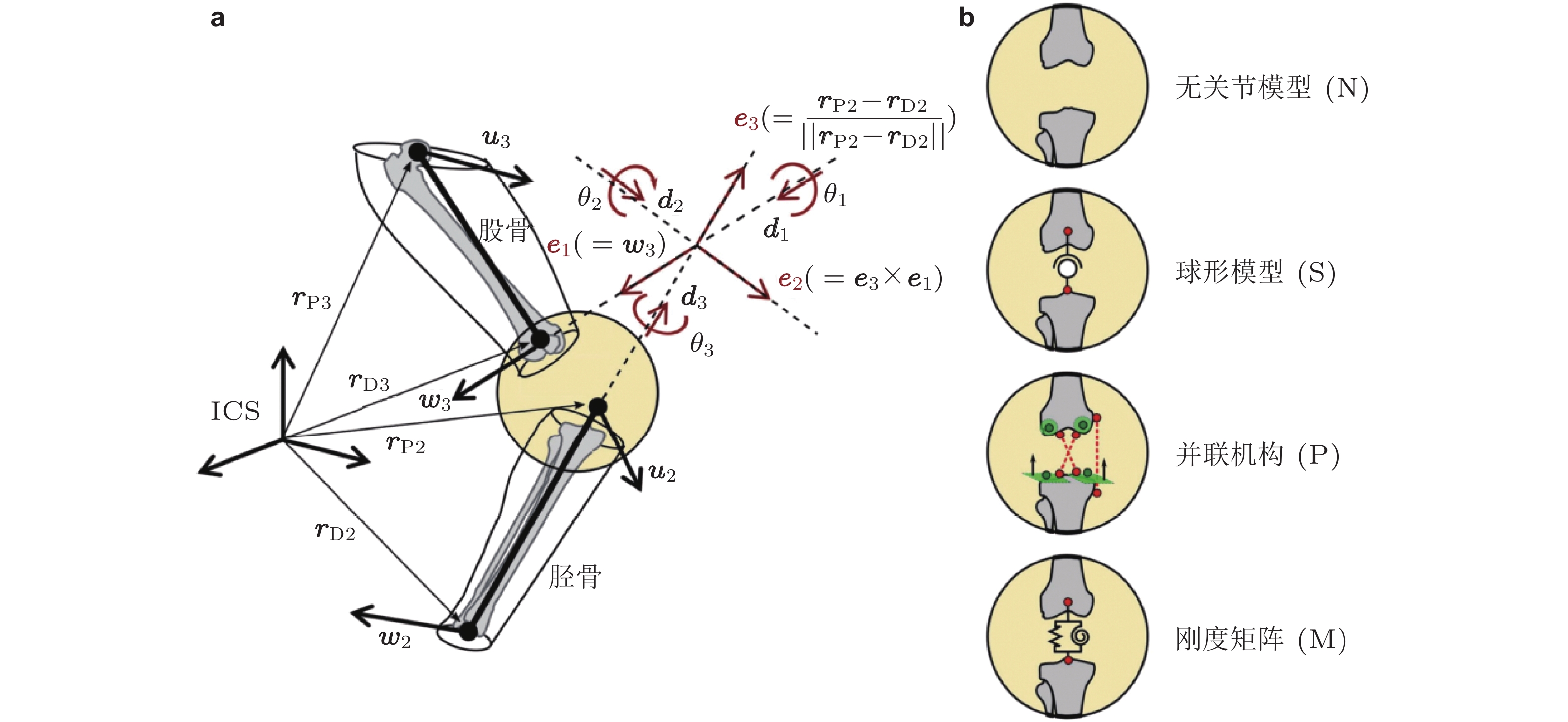
运动生物力学
2026-2-15
设计与制造II
2026-2-15
课程
9
实用工具
4
机械工程
4
专业课
4
经验
1
通核
1
美食
1
紫金港
1
Markdown
1
Typst
1
记录
1
Matlab
1
STM32
1
HKU
1
摄影
1
技巧
1
origin
1
绘图
1
语言
1
文章数:
19
建站天数:
922 天
访问量:
访客数: